
專業移動式視頻監控品牌
移動監控,快速部署

專業移動式視頻監控品牌
移動監控,快速部署

![]() 2021-06-14
2021-06-14
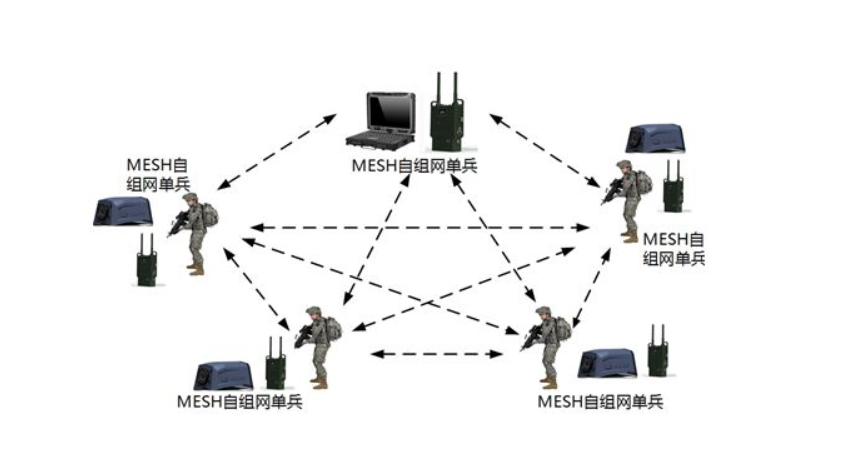
無線自組網作為一種不同于傳統基站終端架構的無線網絡形式,因其靈活的節點,能夠在任何惡劣環境下進行數據的轉發和路由功能,被應用到廣大方面,在軍用領域以及民用領域都有其身影,常見的部隊作戰演習、叢林偵察演練等,民用領域則更加廣泛,覆蓋消防應急、災難應急救援、地方反恐、邊境守衛、礦區勘察等臨時通信系統諸多應用場景,其獨特的通信方式,集基站和終端一體,常見的單兵手持mesh設備,車載組網通信臺,無人系統通信臺等傳輸設備都可以稱之為無線基站臺。
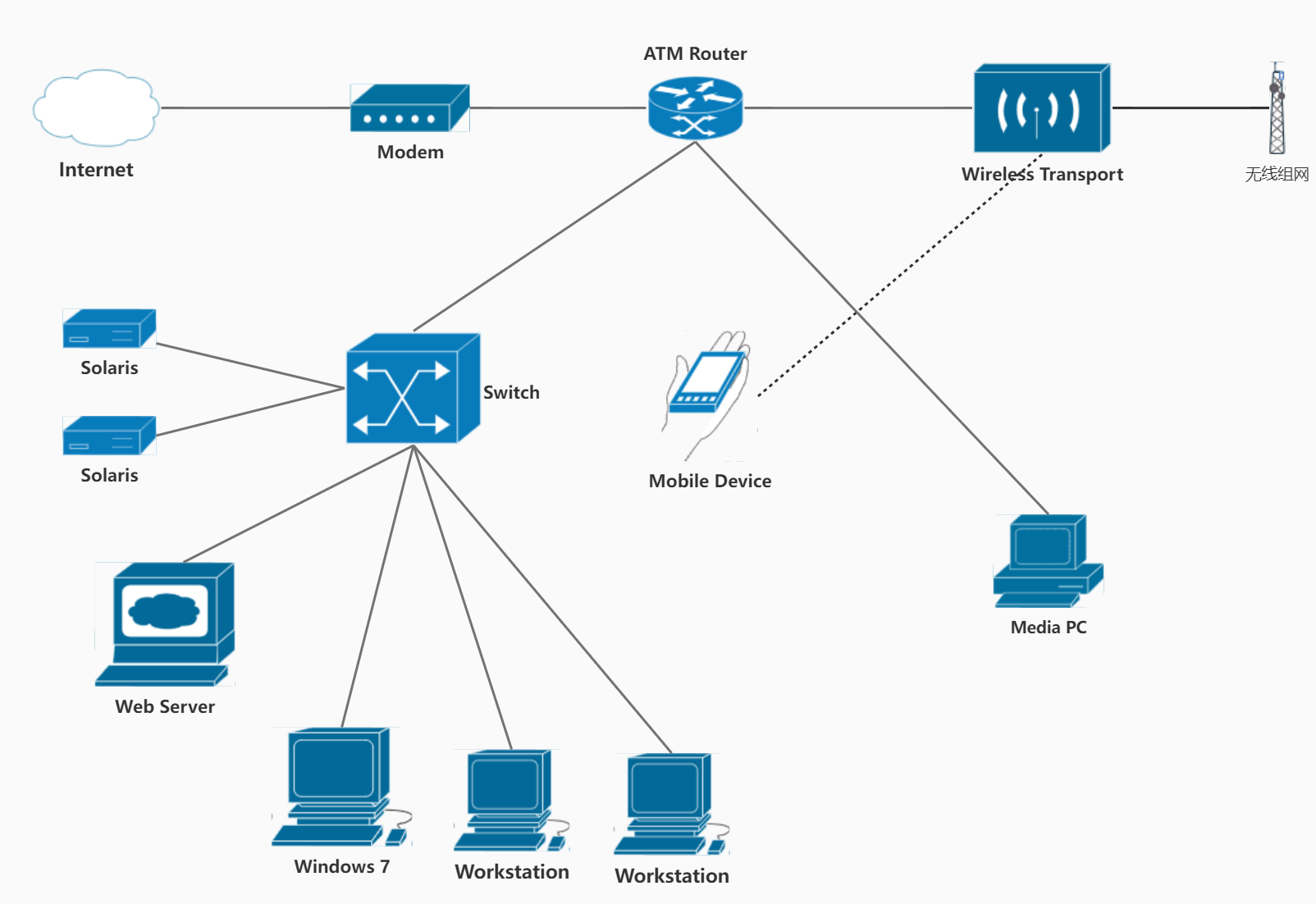
當然,無線自組網絡,其本身源于軍事需求,在轉入民用領域后,也將本身獨特的軍用需求功能代入進去,常見的無中心抗毀性、分布式路由、多跳節點、快速組網等,能夠快速根據場景需求提供多種業務的協同接入,比如衛星技術的結合,前端音視頻信息采集,現場電臺調度指揮,中繼網絡接力等。
在衛星技術的不斷發展的環境下,無線自組網在衛星通信領域的研究也在不斷增加。在國外也有早有不少針對無線自組網的研究,比如:由Tsai等人基于降低路由開銷的需求,針對大型空間動態拓撲網絡,借鑒Ad-hoc網絡中的動態源路由(Dynamic Source Routing,DSR)路由思想提出了一種低開銷的分布式路由協議 DARTING,Karapantazis 等人通過形成最小路由請求區域來減小路由開銷,借鑒了 Ad-hoc 網絡中的按需距離矢量路由(Ad-hoc On-demand Distance Vector,AODV )思想,提出低軌衛星系統的分布式按需路由計算機網絡。
與傳統網絡相比,無線自組網的特征具有以下幾點:
(1)擁有多變的拓撲結構,網絡節點可以按需分配任意移動,且隨節點移動做不同的應變。
(2)靈活的鏈路帶寬隨節點的移動,為獲取更好的通信性能,通信鏈路可隨節點帶寬分配變化。
(3)能量受限,由于網絡節點的移動特征,節點大多沒有持續能量來源,因而需要考慮節能設計。
由于無線自組織網絡具有由無線通信觸發的多跳特性,因此它面臨著無線移動通信以及網絡配置設備發現,拓撲結構所面臨的常規問題(帶寬優化,功率控制,傳輸質量提高等)需要做關于新的研究主題,例如維護,尋址和自動路由。
解決與無線自組織網絡路由協議相關的問題,多個學術組織也在努力實現無線自組織網絡路由協議的標準化。其中包括 MANET 工作組提交并作為路由協議規范的 OLSR 協議(Optimized Link State Routing protocol)、AODV 協議(Ad hoc on demand distance vector routing protocol)和 DSR 協議(Dynamic Source Routing procotol),為了實現自組網路由需求,需要在其中選擇一種更符合項目實際的路由協議進行研究。

全地形移動機器人監控系統UL-RobotN14
全地形移動機器人監控系統UL-RobotN14 UL-RobotN14 全地形移動機器人監控系統是一款新一代野外作業機器人,無需人員值守。憑借四輪獨立伺服驅動系統與ARM控制架構,四個輪子均可以獨立控制速度。支持巡航點設置和繪制功能、軌道點設置功能和軌跡錄制功能、激光末端定位功能、激光自動回充功能以及高精度2d地 圖建立(包含增量地圖功能)等。重新定義了復雜環境下的自主監控標準,其突破性的運動控制系統,配合激光SLAM建圖與增量50萬平方米以上的地圖技術,使設備在油田、農場、工業園區等場景中展現出卓越的適應性。
友聯哨兵5G智能巡檢移動機器人UL-RobotQ17
友聯哨兵5G智能巡檢移動機器人UL-RobotQ17 UL-RobotQ17友聯哨兵智能巡檢移動機器人是一款基于室內外地形的自主移動機器人,能遠程控制、自動巡檢。不需要人員到現場情況下,可指揮巡邏機器人快速到達目的地,進行現場查看、視頻錄像、遠程喊話、激光驅鳥等。對定期巡邏區域可編制任務,安排機器人自動巡邏,智能識別,對異常事件主動報警,并輸出巡邏報告。重新定義了復雜環境下的自主監控標準,其突破性的運動控制系統,配合激光SLAM建圖與增量50萬平方米以上的地圖技術,使設備在電力、油田、農場、工業園區等場景中展現出卓越的適應性。
小哨兵移動監控系統太陽能電池供電超長續航便捷監控
小哨兵移動監控系統太陽能電池供電超長續航便捷監控 友聯哨兵多功能移動兵站(輕便型小哨兵移動監控)是一款十分靈活的中小型移動監控設備,自帶網電,具備較高的機動性,系統可集高清視頻監控、照明、報警、廣播、對講、氣象環境監測、存儲、控制、無線傳輸、一鍵升降等功能于一體,并可具備市電、太陽能等多種能源補給方式,提升續航時間,以適應各類復雜的環境。戶外使用,不懼風雨,隨需移動,循環利用。可廣泛用于石油管道巡檢、工地監控、電力維修監控、活動安防、戶外作業等臨時監控或長期監控。
 深圳市友聯華科技有限公司
深圳市友聯華科技有限公司 0755-21000395
0755-21000395 marketing@ulinkhua.com
marketing@ulinkhua.com 深圳市龍華區民治街道樟坑社區民康路東明大廈752
深圳市龍華區民治街道樟坑社區民康路東明大廈752
Copyright ? 深圳市友聯華科技有限公司 2012-2025 All rights reserved 粵ICP備2020100240號 粵公網安備 44030902002464號 技術支持:友聯哨兵